- Out-of-Stock
")
Out-of-Stock
")
")
")
")
When program run, the DC motor will turn in clockwise and anti clockwise direction with speed up and speed down sequence. This tutorial will work with the Hi-Tech C compilers.
PWM (Pulse-width modulation) Operations:
iBoard connection:
Video:
Download:
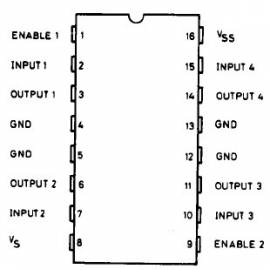
The L293D is a dual H-bridge driver which able to control two DC motors in forward and backward direction.
This L293D is a Quadruple Half-H Drivers to drive the inductive loads (relays, DC and stepping motors).
This program shows how to use ULN2003A and PWM mode to control light dimming.
This program shows how to use ULN2003A to control the stepper motor.
This program shows how to use the servo motors on a PIC16F722.
This program shows how to use L293D and PWM mode to control the DC motor.